Operation Guide
3 Operating Procedure
Note: The following points should be noted when using and storing the device:
- Do not operate the device's connections while powered on, as it may damage the device.
- The device's operating temperature range is from -20°C to +60°C. It should be used within the specified environmental temperature range.
- Avoid placing the device in humid or corrosive environments frequently.
- The device is not waterproof. Do not operate it in rainy or snowy weather.
- During operation, keep an eye on obstacles in front of you to avoid collisions with the device.
- When placing the device, ensure it is on a level surface and monitored to prevent it from tipping over.
3.1 Before Scanning
3.1.1 Power on the device
- Turn on the device by pressing the SENSOR button first, followed by the MASTER button
- Wait for 30 seconds, then turn on the camera power.
3.1.2 Connect to the control system
Note: During use, do not exceed a distance of five meters from the device to ensure a good WiFi connection signal. Connect to the WIFI of device Open the phone browser and enter the address: 192.168.95.110:8888. Wait for a moment to access the data collection interface.
3.1.3 Connect the device to an available network
If RTK mode is required, there are two ways to connect the device to the network: ① Insert a wireless USB network card.
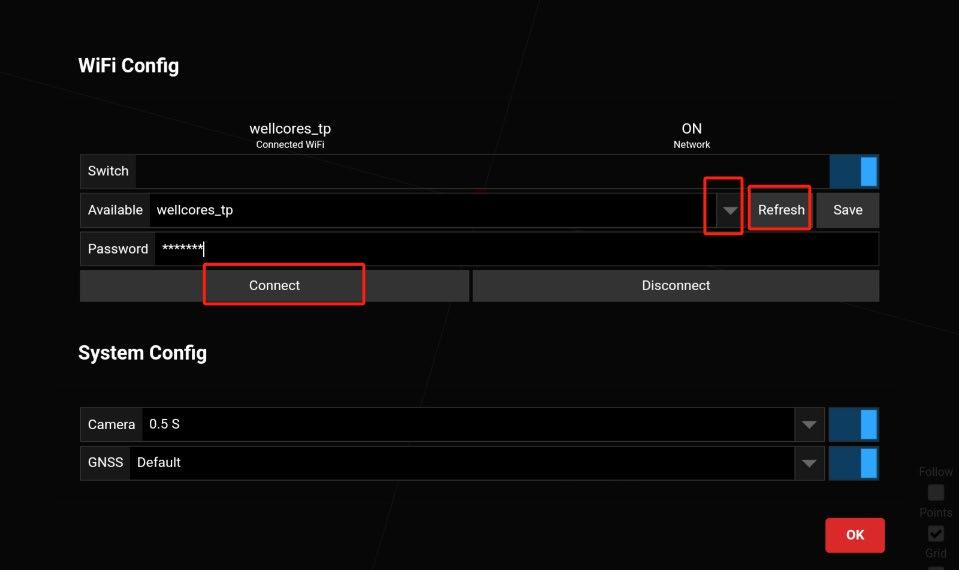
Click "Config", then click "Refresh" to refresh the WiFi list. Click the triangle icon to select a WiFi network, enter the password, and click "Connect" to connect the device to an available WiFi network. (It is recommended that the WiFi name be in English.)
Figure 3-1
3.2 Data Collecting
3.2.1.1 TersusMVP Capture
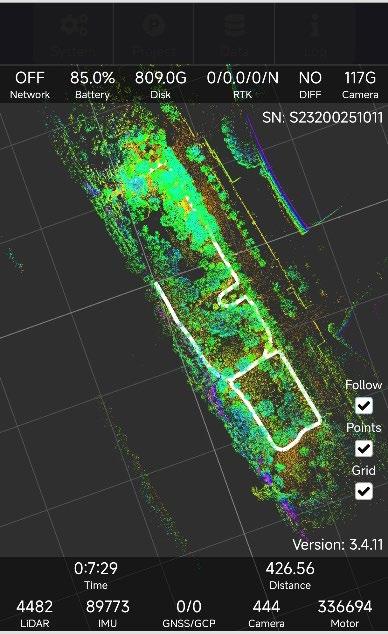
The TersusMVP Capture Web UI includes the following five functional zones: System:configure the device and connect to CORS to receive differential information. Project:set project name, start/stop collecting, grab GCP, show real time pointcloud. Data:View the collected projects. Log:Record and display the device’s operation log information. Status:sensor status, RTK status, image taken. The sensor status and project information are as follows: Network: ON-the device has connected to an available network;OFF-Network connection interrupted. Battery: remaining battery level. Disk: remaining disk capacity. RTK:RTK status /HDOP/satellite number/positioning status, when the RTK status is 4, and HDOP<3.0, the positioning status will be Y (Yes), indicating that the device is fixed, or the
positioning status will remain as N (NO). DIFF:"YES" indicates that the RTK differential signal is being received normally; "NO" indicates that the RTK differential signal has not been received. Time: collecting time. Distance: distance from the starting position. LiDAR: LiDAR data volume. IMU: IMU data volume. GNSS: GNSS data volume. GCP: GCP count. Camera: image count.
Figure 3-2
3.2.1.2 Backpack Operating Procedure
-
Place the device in an open area with the LiDAR sensor facing a fixed, stationary structure. Make sure no fast-moving objects pass in front of the LiDAR.
-
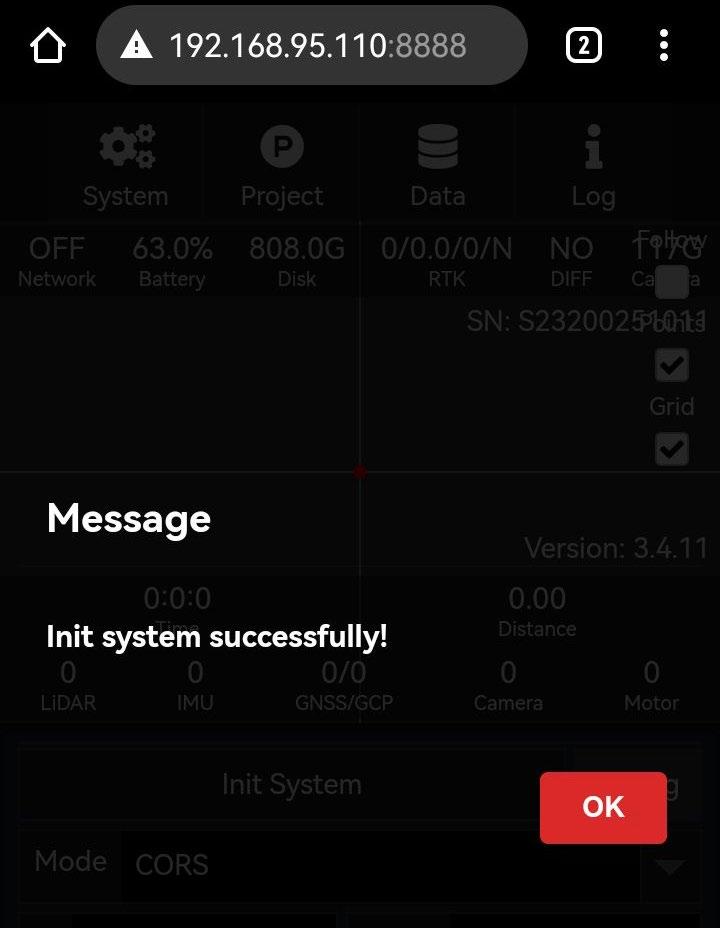
Click the MASTER and SENSOR button, and then turn on the camera. Connect your phone to the device’s Wi-Fi, open a browser, and enter the IP address 192.168.95.110:8888 to access the control interface.
-
Click "Config" to select whether to enable the panoramic camera and RTK mode. If RTK is used, you need to configure the device to connect to an available Wi-Fi network (see 3.1.3) and then connect to CORS (see 3.2.1.2 5.).
-
Click the "Initialize" button to start the system self-check. If the self-check is successful, a "Init system successfully" dialog box will pop up. Click "OK" to proceed.
Figure 3-3
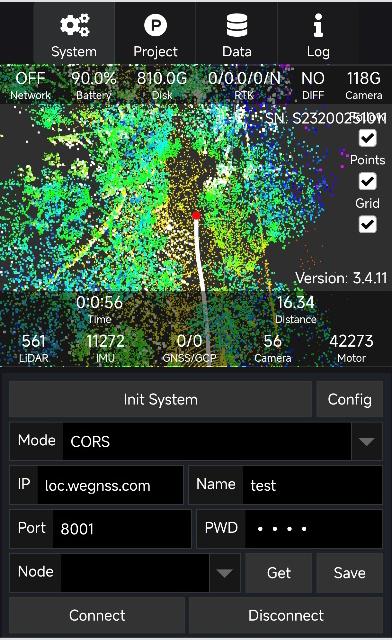
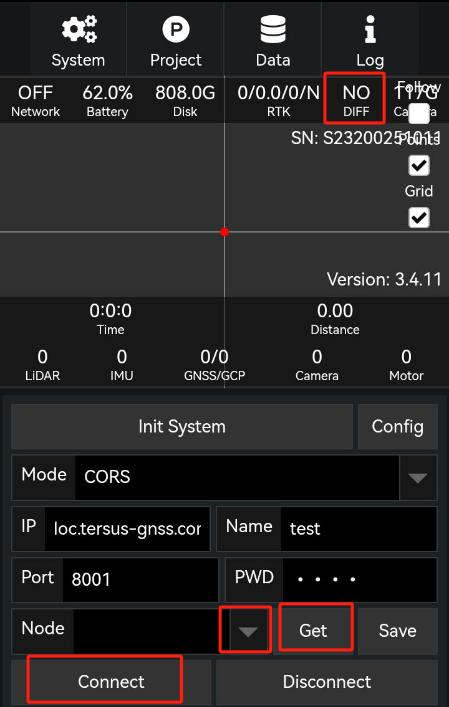
- Enter the CORS server IP address, port, username, and password. Click “Get,” then click the downward arrow select an available mount point. After that, click “Connect.” Once connected successfully, the differential data status “DIFF” will change from “NO” to “YES”.
Figure 3-4
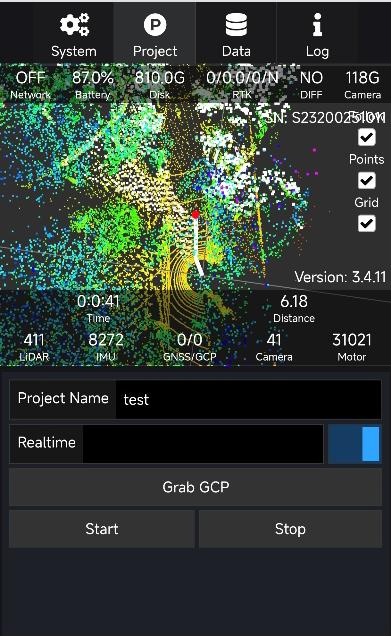
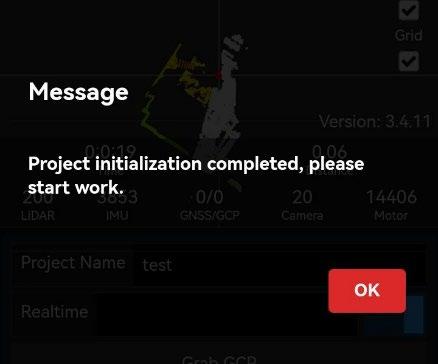
- Move to an open area and wait until the positioning status shows 4 (Fixed) and the HDOP value is less than 3.0 before starting the data collection. Click "Project," enter the "Project Name". To view the point cloud in real time, you need to turn on the “Realtime” switch. Then click "Start". After approximately 14 seconds, a dialog box will appear indicating the beginning of the operation, and data collection will commence.
Figure 3-5
- When data collection is complete, click the “Stop” button (you must stop the collection when the battery level is close to 0%). A “Data check successfully” dialog will appear—click “OK” to confirm.
Figure 3-6
3.2.1.3 Handheld Operating Procedure
1.Screw the Target Board onto the bottom of the Handhel Module and secure it tightly with screws. Place the LiDAR horizontally on the base in an open area, facing a stationary structure. Make sure no rapidly moving objects pass above the LiDAR. 2.Attach the shoulder strap to the Master Module, and connect the data cable between the Master Module and the Handheld Module.
3.Click the MASTER and SENSOR button, and then turn on the camera. The remaining operations are the same as those for backpack operation.
3.2.1.4 Grab GCP
1.Align the cross-shaped hole on the Target Board with the ground control point (GCP). As long as the Target Board is firmly positioned on the GCP, the LiDAR module’s orientation— whether vertical or tilted—will not affect the final result. Then, tap the “Grab GCP” button on the mobile interface.
Figure 3-7
2.A dialog box will pop up to record the GCP number. Click “OK”. The GCP name cannot and should not be changed.
Figure 3-8
3.When you see the number of GCPs increase, it indicates that the current collection is complete.
Note: The number of GCP must not be less than four, and their positions must not lie on a straight line. They should be evenly distributed across the survey area.
Figure 3-9
3.3 Data Copying and Power Off
3.3.1 Data Copying
The USB drive used for data copying must be formatted as an NTFS file system. A USB 3.0 drive is recommended. Insert the USB drive into the inner USB 3.0 port on the main unit panel (the port near the back frame in backpack mode).
Use the software to copy the data:
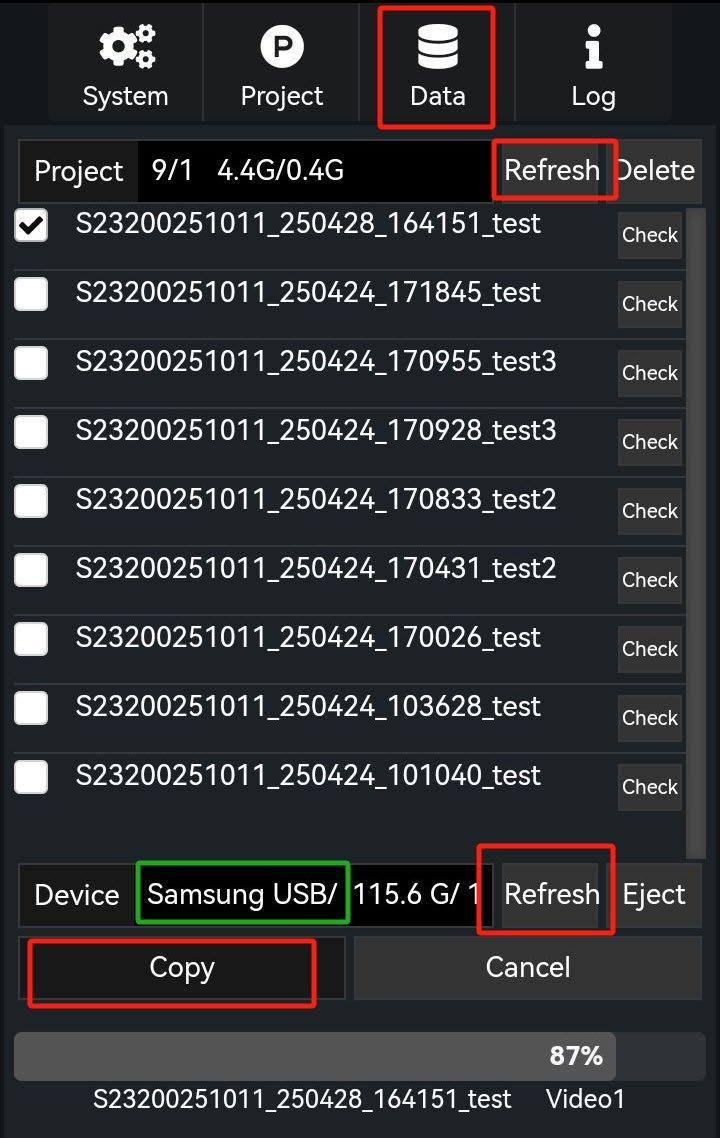
- Click the "Data" menu tab and select "Refresh" to display project files from completed tasks.
- Select the data file to be copied.
- Click "Refresh" in the device panel to check the remaining storage space on the USB drive and compare it with the size of the data file.
- Click "Copy." When the transfer is complete, a "Copy completed" dialog box will pop up.
Figure 3-10
3.3.2 Power Off
Shut down the device in the following steps:
- Press and hold the camera power button to turn off the camera.
- Press the MASTER power button; the master power indicator (red) should turn off.
- Press the SENSOR power button; the sensor indicator (blue) should turn off.
4 Data Scanning Guide
This chapter explains how to use the device to carry out data collection tasks to achieve optimal results. Before beginning the operation, the operator should survey the environment to identify potential problematic scenarios, such as areas with few distinguishable features, high levels of moving objects, or narrow spaces. If any of these conditions are present, please follow the recommendations in this chapter. Additionally, the planned collection path should include as many loop closures as possible to enhance the accuracy of the final dataset.
4.1 Effective features
The SLAM algorithm used by this device relies on effective environmental features to reconstruct 3D point clouds. These effective features include static objects such as buildings, lampposts, and tree trunks. Moving objects—such as vehicles, pedestrians, swaying leaves, and grass—are not considered effective features. In fact, they negatively impact the accuracy of the SLAM algorithm, so it's important to minimize scanning of dynamic elements. In environments lacking sufficient features—such as smooth tunnels or open flat areas—it's recommended to add artificial features, such as parked vehicles, large boxes, umbrellas, or roll-up banners. During scanning, also ensure the device is oriented properly, so the LiDAR continues to capture these artificial features throughout the process.
4.2 Moving Objects
As mentioned earlier, moving objects such as vehicles, pedestrians, swaying leaves, and grass are not effective features and can significantly degrade the accuracy of the SLAM algorithm. If too many dynamic elements are captured, it can even cause complete failure in reconstructing the 3D point cloud. Therefore, minimizing the presence of moving objects during scanning is essential. Please follow the guidelines below:
- No unnecessary personnel should follow the device. Apart from the operator, others should not walk near the device during operation. If following is necessary, maintain a distance of at least 20 meters behind the device.
- Actively avoid scanning moving objects during collection. If a moving object approaches—such as a car or a group of people—rotate the device to direct the LiDAR toward static objects instead. Once the moving object has passed and is
more than 20 meters away, you can return the device to its original orientation and resume normal scanning. This reduces the likelihood of dynamic interference. 3. Be cautious during seasons with dense vegetation. Swaying leaves and tall grass can severely interfere with the SLAM algorithm. Avoid scanning too many leafy or grassy areas. Do not walk under dense low-hanging trees where leaves are closer than 1 meter to the LiDAR, as they may block the LiDAR beams entirely. Avoid traversing through large, flower-covered or grassy fields, which often lack stable features and can introduce SLAM errors.
4.3 Narrow Spaces
A narrow space refers to environments where the LiDAR data is limited to a 1.5-meter range. In such spaces, the LiDAR’s view is often obstructed, making it challenging to capture accurate data. This is common in scenarios like entering a room through a door or moving from outdoors to indoors. When navigating narrow spaces, here are some key guidelines to follow:
- Move slowly through the narrow space. Ensure that the movement through confined areas is steady and slow to give the LiDAR enough time to capture the available features.
- Avoid getting too close to walls. Keep a safe distance from walls or other barriers, as getting too close may obstruct the LiDAR's scanning range and cause incomplete data collection.
- Do not scan moving objects during narrow space traversal. Avoid scanning moving objects, such as people, as they can interfere with the accuracy of the LiDAR data. Try to wait until the area is clear of moving objects before scanning.
- Pre-open all doors before entering narrow spaces. If you need to pass through doors, make sure they are open before starting the scan. Closed doors can block the LiDAR's view, making data collection difficult or impossible.
- Adjust the LiDAR's orientation if necessary. When passing through a narrow space, it might help to rotate the LiDAR towards previously scanned areas (such as during backward walking in handheld or backpack configurations). This ensures continued data capture from areas already covered, which can improve overall data consistency.
4.4 Closed Loop
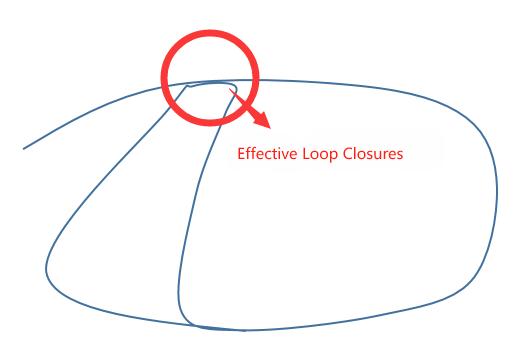
Loop closure is an important method for improving data accuracy. Whenever possible, the collection route should form a loop closure. A loop closure needs to be a circular loop, meaning it should enter the same location from different directions. Repeating data collection along a single route will not form a loop. Typical loop closure routes include walking around a building and returning to the starting point, entering the same floor in a multi-story building from different stairways, or entering and exiting a room through multiple doors. The loop needs to have a certain degree of overlap (at least 15 meters). As shown in the figure below:
Figure 4-1
Here are examples of failed loop closures. 1.Incorrect loop closure.
Figure 4-2
2.Overlapping distance is too short.
Figure 4-3
4.5 Initialization
Project initialization refers to the process at the beginning of a project, starting from the LiDAR being stationary, then beginning to spin, and finally the operator picking up the device to begin data collection. The following points should be noted:
- The LiDAR should face a scene with rich features, and neither the operator nor others should block the sensor.
- When the operator picks up the device or is assisted by others in wearing it, make sure the LiDAR is not fully covered, so it can scan as many effective features as possible.
4.6 RTK Data
RTK data is used to control the overall accuracy of the model, so it is important to collect as much RTK data as possible during acquisition. If, based on experience, the current location should allow for RTK but no RTK fix is present, the operator should stop and remain stationary for a while, allowing the GNSS receiver to converge to a fixed solution before resuming data collection.
4.7 Move Speed
It is recommended to operate the device at walking speed (approximately 4 km/h) to achieve optimal accuracy and point cloud density. If a higher speed is necessary, the maximum speed should not exceed 10 km/h.


Figures





Support: support@tersus-gnss.com