AR Stakeout
5.1 Introduction
AR stakeout for Tersus TS21 is an innovative integration of GNSS, IMU and dual cameras. Front and bottom cameras work together to precisely mark the targets on the live view at different distances. Guided by a clear, eye-catching directional arrow and real-time distance display, it achieves up to a 70% improvement in efficiency.
5.2 Start AR Stakeout
1) Connect TS21 via WiFi and start rover mode to get a fixed solution.
2) Turn on Tilt, input the correct pole height and finish the tilt initialization.
3) Enter Point Stakeout interface. Click  to show the Staking Point list and click [Import] to import targets from file, from other point lists or directly manually add.
to show the Staking Point list and click [Import] to import targets from file, from other point lists or directly manually add.
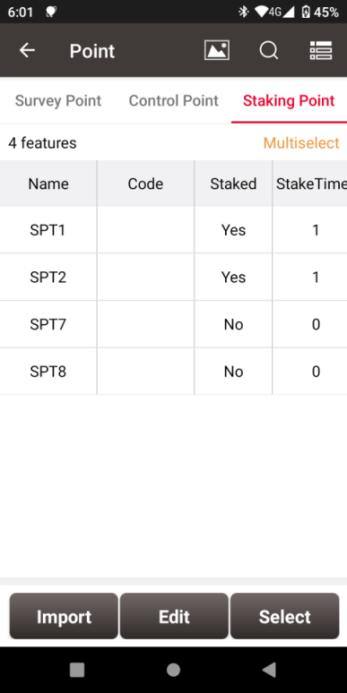
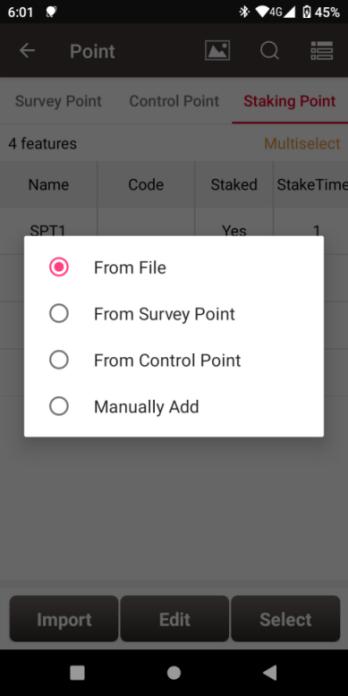
Figure 5.1 Staking Point List Figure 5.2 Import Targets
6) Select one of the point as the target, back to the Point Stakeout interface. Click ![]() to open the bottom camera and enter AR staking interface.
to open the bottom camera and enter AR staking interface.
5.3 Go to the Target
The target point will be calculated and displayed in the real scene as shown below. When the current position is several meters away from targets, it will display the live view from the front camera and mark targets on it. As moving closer, it will automatically switch to the bottom camera view and even zooms in when very close to the targets.
It also indicates the direction and distance from the current position to the target on both front camera view and bottom camera view. Move toward the target until the pole tip aligns with the target to complete the AR stakeout.


Target Point
Direction
Figure 5.3 AR Stakeout with Front and Bottom Cameras